死磕以太坊源码分析之Kademlia算法
- 链上无名
- 发布于 2020-12-28 08:39
- 阅读 6812
死磕以太坊源码分析之Kademlia算法
死磕以太坊源码分析之Kademlia算法
KAD 算法概述
Kademlia是一种点对点分布式哈希表(DHT),它在容易出错的环境中也具有可证明的一致性和性能。使用一种基于异或指标的拓扑结构来路由查询和定位节点,这简化了算法并有助于证明。该拓扑结构有一个特点:每次消息交换都能够传递或强化有效信息。系统利用这些信息进行并发的异步查询,可以容忍节点故障,并且故障不会导致用户超时。
KAD算法要处理的问题
- 如何分配存储内容到各个节点,新增/删除内容如何处理
- 如何找到存储文件的节点/地址/路径
节点状态
节点的基本属性包括如下:
- 节点ID,Node ID
- 节点IP地址与端口号
在 Kad 网络中,所有节点都被当作一颗二叉树的叶子,并且每一个节点的位置都由其 ID 值的最短前缀唯一的确定。
对于任意一个节点,都可以把这颗二叉树分解为一系列连续的,不包含自己的子树。最高层的子树,由整颗树不包含自己的树的另一半组成;下一层子树由剩下部分不包含自己的一半组成;依此类推,直到分割完整颗树。图 1 就展示了节点0011如何进行子树的划分:
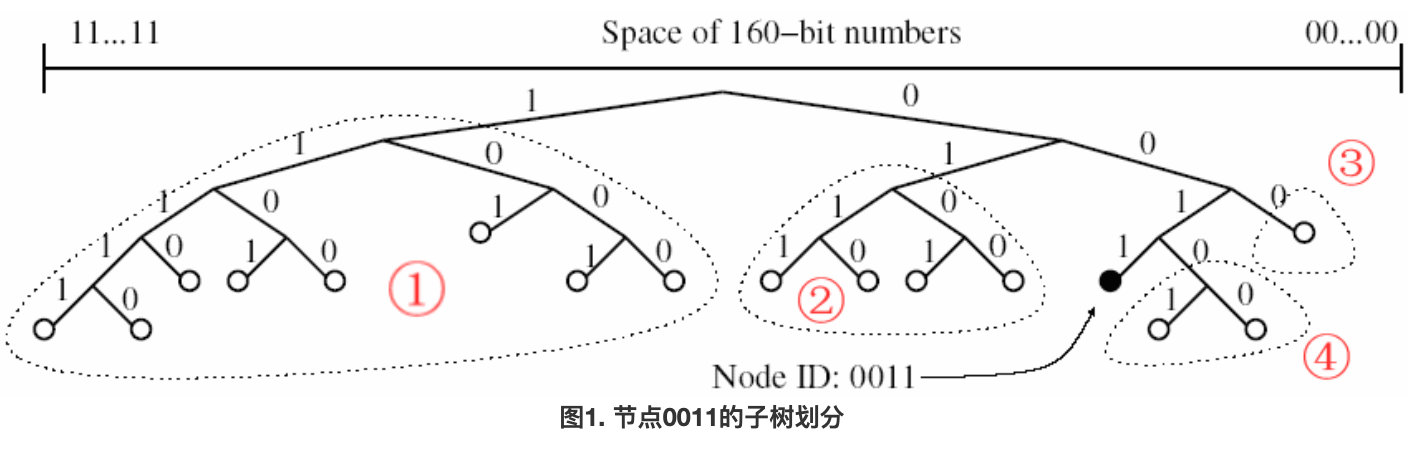
虚线包含的部分就是各子树,由上到下各层的前缀分别为0,01,000,0010。
Kad 协议确保每个节点知道其各子树的至少一个节点,只要这些子树非空。在这个前提下,每个节点都可以通过ID值来找到任何一个节点。这个路由的过程是通过所谓的 XOR(异或)距离得到的。
图 2 就演示了节点0011如何通过连续查询来找到节点1110的。节点0011通过在逐步底层的子树间不断学习并查询最佳节点,获得了越来越接近的节点,最终收敛到目标节点上。
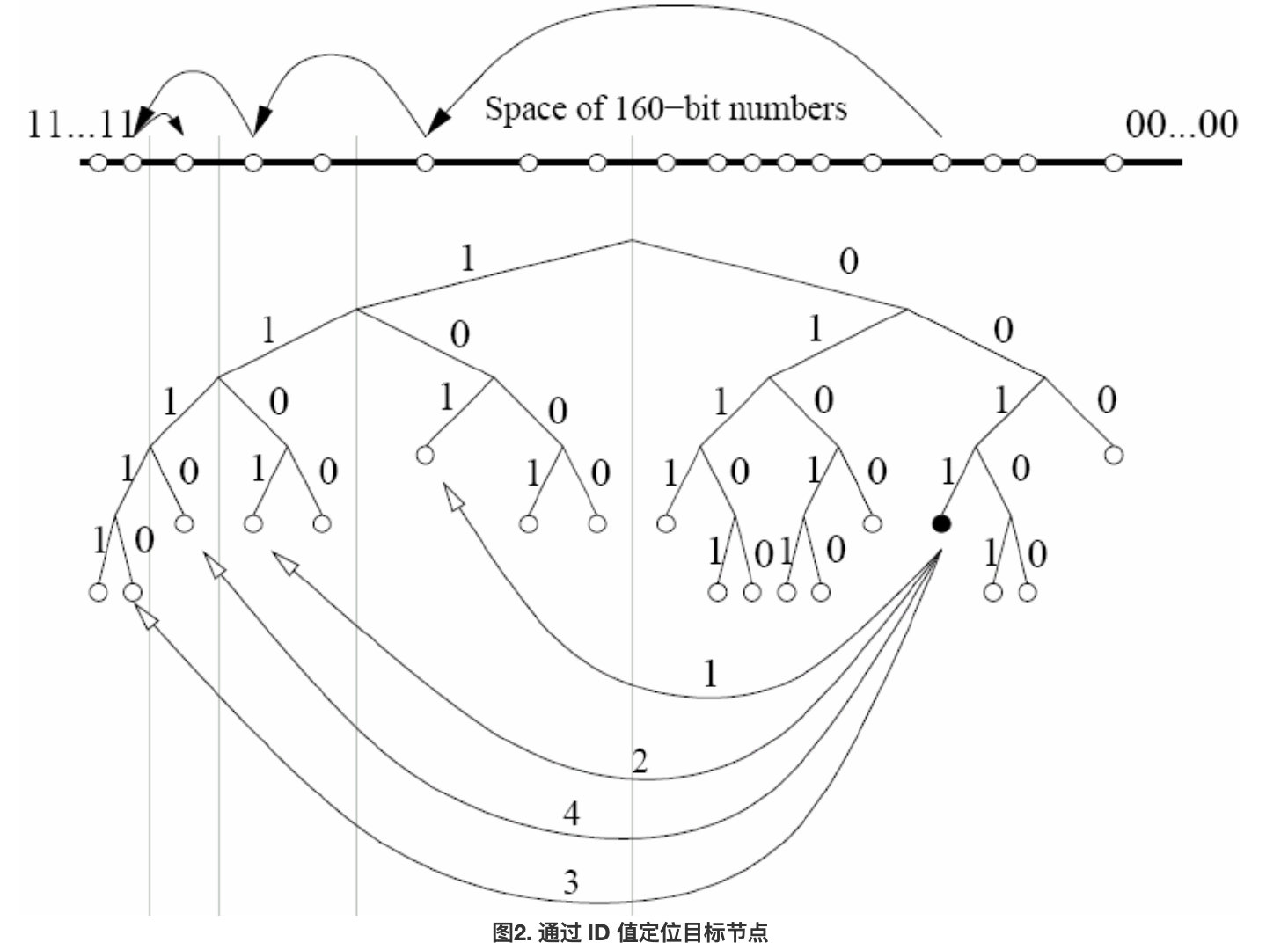
需要说明的是:只有第一步查询的节点101,是节点0011已经知道的,后面各步查询的节点,都是由上一步查询返回的更接近目标的节点,这是一个递归操作的过程。
节点距离
Kad 网络中每个节点都有一个 160 bit 的 ID 值作为标志符,Key 也是一个 160 bit 的标志符,每一个加入 Kad 网络的计算机都会在 160 bit 的 key 空间被分配一个节点 ID(node ID)值(可以认为 ID 是随机产生的), <key,value> 对的数据就存放在 ID 值“最”接近 key 值的节点上。
判断两个节点 x,y 的距离远近是基于数学上的异或的二进制运算, d(x,y)=x⊕y ,既对应位相同时结果为0,不同时结果为1。例如:
010101
XOR 110001
----------
100100则这两个节点的距离为 32+4=36 。
显然,高位上数值的差异对结果的影响更大。
对于异或操作,有如下一些数学性质:
- 两个节点间的距离是随机的
- 节点与自身的距离是0
- 对称性。A 到 B 的距离和 B 到 A 的距离相等
- 三角不等。distance(A,B)+distance(B,C) <= distance(A,C)
对于任意给定的节点 x 和距离 Δ≥0 ,总会存在一个精确的节点 y ,使得 d(x,y)=Δ 。另外,单向性也确保了对于同一个 key 值的所有查询都会逐步收敛到同一个路径上,而不管查询的起始节点位置如何。这样,只要沿着查询路径上的节点都缓存这个 <key,value> 对,就可以减轻存放热门 key 值节点的压力,同时也能够加快查询响应速度。
K桶
K 桶的概念
Kad 的路由表是通过一些称之为 K 桶的表格构造起来的。
对每一个 0≤i≤160 ,每个节点都保存有一些和自己距离范围在区间 [2^i^,2^i+1^) 内的一些节点信息,这些信息由一些 (IP address,UDP port,Node ID) 数据列表构成(Kad 网络是靠 UDP 协议交换信息的)。每一个这样的列表都称之为一个 K 桶,并且每个 K 桶内部信息存放位置是根据上次看到的时间顺序排列,最近( least-recently)看到的放在头部,最后(most-recently)看到的放在尾部。每个桶都有不超过 k 个的数据项。
一个节点的全部 K 桶列表如下图 所示:
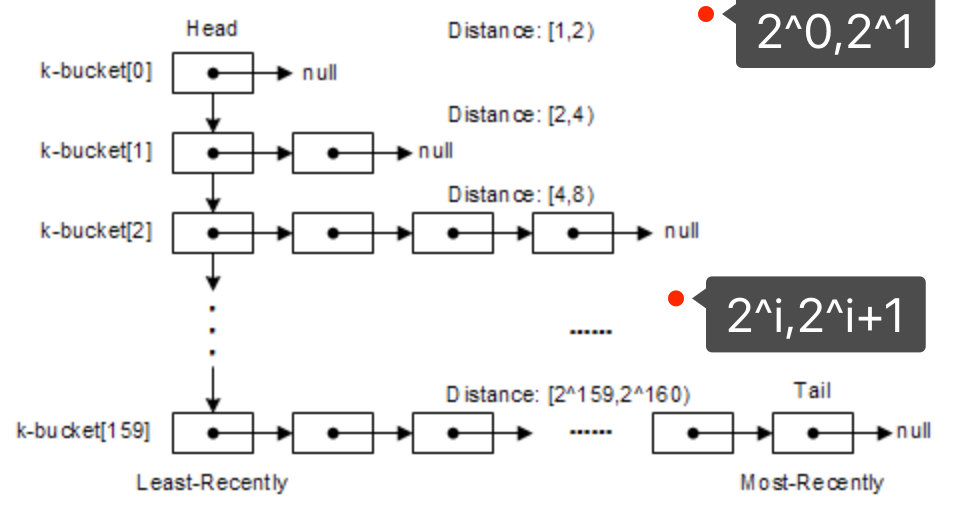
当 i 值很小时,K 桶通常是空的(也就是说没有足够多的节点,比如当 i = 0 时,就最多可能只有1项);而当 i 值很大时,其对应 K 桶的项数又很可能会超过 k 个(当然,覆盖距离范围越广,存在较多节点的可能性也就越大),这里 k 是为平衡系统性能和网络负载而设置的一个常数,但必须是偶数,比如 k = 20。在 BitTorrent 的实现中,取值为 k = 8。
由于每个 K 桶覆盖距离的范围呈指数关系增长,这就形成了离自己近的节点的信息多,离自己远的节点的信息少,从而可以保证路由查询过程是收敛。因为是用指数方式划分区间,经过证明,对于一个有 N 个节点的 Kad 网络,最多只需要经过 logN 步查询,就可以准确定位到目标节点。
K桶更新机制
当节点 x 收到一个 PRC 消息时,发送者 y 的 IP 地址就被用来更新对应的 K 桶,具体步骤如下:
- 计算自己和发送者的距离: d(x,y)=x⊕y ,注意:x 和 y 是 ID 值,不是 IP 地址
- 通过距离 d 选择对应的 K 桶进行更新操作
- 如果 y 的 IP 地址已经存在于这个 K 桶中,则把对应项移到该该 K 桶的尾部
- 如果 y 的 IP 地址没有记录在该 K 桶中
- 如果该 K 桶的记录项小于 k 个,则直接把 y 的 (IP address, UDP port, Node ID) 信息插入队列尾部
- 如果该 K 桶的记录项大于 k 个,则选择头部的记录项(假如是节点 z)进行 RPC_PING 操作
- 如果 z 没有响应,则从 K 桶中移除 z 的信息,并把 y 的信息插入队列尾部
- 如果 z 有响应,则把 z 的信息移到队列尾部,同时忽略 y 的信息
K 桶的更新机制非常高效的实现了一种把最近看到的节点更新的策略,除非在线节点一直未从 K 桶中移出过。也就是说在线时间长的节点具有较高的可能性继续保留在 K 桶列表中。
所以,通过把在线时间长的节点留在 K 桶里,Kad 就明显增加 K 桶中的节点在下一时间段仍然在线的概率,这对应 Kad 网络的稳定性和减少网络维护成本(不需要频繁构建节点的路由表)带来很大好处。
这种机制的另一个好处是能在一定程度上防御 DOS 攻击,因为只有当老节点失效后,Kad 才会更新 K 桶的信息,这就避免了通过新节点的加入来泛洪路由信息。
为了防止 K 桶老化,所有在一定时间之内无更新操作的 K 桶,都会分别从自己的 K 桶中随机选择一些节点执行 RPC_PING 操作。
上述这些 K 桶机制使 Kad 缓和了流量瓶颈(所有节点不会同时进行大量的更新操作),同时也能对节点的失效进行迅速响应。
协议消息
Kademlia 协议包括四种远程 RPC 操作:PING、STORE、FIND_NODE、FIND_VALUE。
-
PING 操作的作用是探测一个节点,用以判断其是否仍然在线。
-
STORE 操作的作用是通知一个节点存储一个
<key,value>对,以便以后查询需要。 -
FIND_NODE 操作使用一个 160 bit 的 ID 作为参数。本操作的接受者返回它所知道的更接近目标 ID 的 K 个节点的 (IP address, UDP port, Node ID) 信息。
这些节点的信息可以是从一个单独的 K 桶获得,也可以从多个 K 桶获得(如果最接近目标 ID 的 K 桶未满)。不管是哪种情况,接受者都将返回 K 个节点的信息给操作发起者。但如果接受者所有 K 桶的节点信息加起来也没有 K 个,则它会返回全部节点的信息给发起者。
-
FIND_VALUE 操作和 FIND_NODE 操作类似,不同的是它只需要返回一个节点的 (IP address, UDP port, Node ID) 信息。如果本操作的接受者收到同一个 key 的 STORE 操作,则会直接返回存储的 value 值。
注:在 Kad 网络中,系统存储的数据以
<key,value>对形式存放。根据笔者的分析,在 BitSpirit 的 DHT 实现中,其 key 值为 torrent 文件的 info_hash 串,其 value 值则和 torrent 文件有密切关系。
为了防止伪造地址,在所有 RPC 操作中,接受者都需要响应一个随机的 160 bit 的 ID 值。另外,为了确信发送者的网络地址,PING 操作还可以附带在接受者的 RPC 回复信息中(在上述 4种操作中 接受者回复 发送者时,可以携带上 接受者对 发送者的 PING, 以此校验 发送者是否还健在)。
路由查找
Kad 技术的最大特点之一就是能够提供快速的节点查找机制,并且还可以通过参数进行查找速度的调节。
假如节点 x 要查找 ID 值为 t 的节点,Kad 按照如下递归操作步骤进行路由查找:
- 计算到 t 的距离: d(x,y)=x⊕y
- 从 x 的第 [logd] 个 K 桶中取出 α 个节点的信息(“[”“]”是取整符号),同时进行 FIND_NODE 操作。如果这个 K 桶中的信息少于 α 个,则从附近多个桶中选择距离最接近 d 的总共 α 个节点。
- 对接受到查询操作的每个节点,如果发现自己就是 t,则回答自己是最接近 t 的;否则测量自己和 t 的距离,并从自己对应的 K 桶中选择 α 个节点的信息给 x。
- X 对新接受到的每个节点都再次执行 FIND_NODE 操作,此过程不断重复执行,直到每一个分支都有节点响应自己是最接近 t 的。
- 通过上述查找操作,x 得到了 k 个最接近 t 的节点信息。
注意:这里用“最接近”这个说法,是因为 ID 值为 t 的节点不一定存在网络中,也就是说 t 没有分配给任何一台电脑。
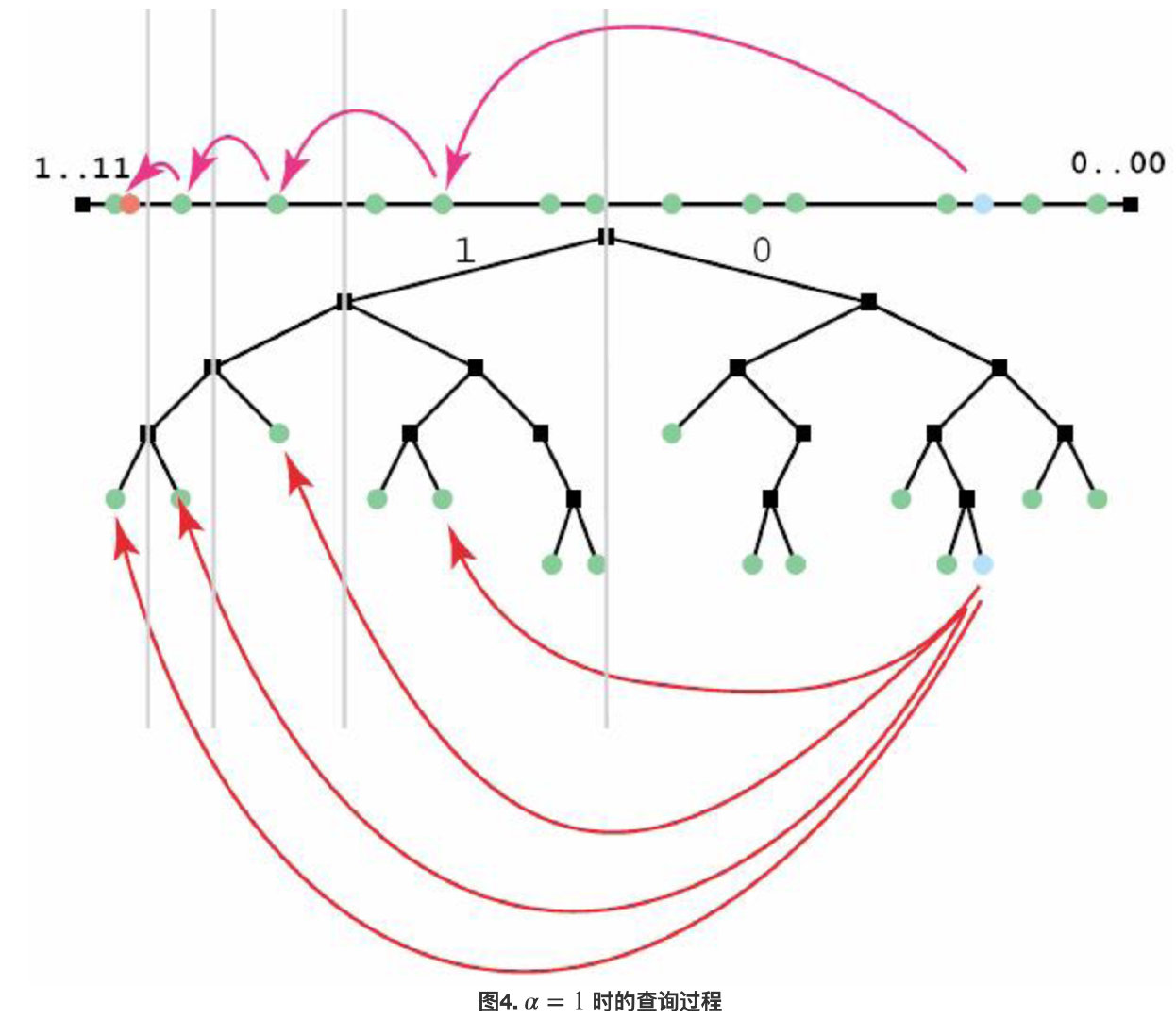
这里 α 也是为系统优化而设立的一个参数,就像 K 一样。在 BitTorrent 实现中,取值为 α=3 。
当 α=1 时,查询过程就类似于 Chord 的逐跳查询过程,如图 4。
整个路由查询过程是递归操作的,其过程可用数学公式表示为:
N0=x (即查询操作的发起者)
N1=find ⎯noden0(t)
N2=find ⎯noden1(t)
... ...
Nl=find ⎯nodenl−1(t)
这个递归过程一直持续到 Nl=t ,或者 Nl 的路由表中没有任何关于 t 的信息,即查询失败。
由于每次查询都能从更接近 t 的 K 桶中获取信息,这样的机制保证了每一次递归操作都能够至少获得距离减半(或距离减少 1 bit)的效果,从而保证整个查询过程的收敛速度为 O(logN) ,这里 N 为网络全部节点的数量。
当节点 x 要查询 <key,value> 对时,和查找节点的操作类似,x 选择 k 个 ID 值最接近 key 值的节点,执行 FIND_VALUE 操作,并对每一个返回的新节点重复执行 FIND_VALUE 操作,直到某个节点返回 value 值。
一旦 FIND_VALUE 操作成功执行,则 <key,value> 对数据会缓存在没有返回 value 值的最接近的节点上。这样下一次查询相同的 key 时就会更加快速的得到结果。通过这样的方式,热门 <key,value> 对数据的缓存范围就逐步扩大,使系统具有极佳的响应速度( cache 为存活24小时,但是目标节点上的内容时每1小时向其他最近节点重新发布<key, value>使得数据的超时时间得以刷新,而远离目标节点的节点的数据存活时间当然就可能不会被重新发布到,所以也就是数据缓存的超时时间和节点的距离成反比)
数据存储
存放 <key,value> 对数据的过程为:
- 发起者首先定位 k 个 ID 值最接近 key 的节点
- 发起者对这 k 个节点发起 STORE 操作
- 执行 STORE 操作的 k 个节点每小时重发布自己所有的
<key,value>对数据 - 为了限制失效信息,所有
<key,value>对数据在初始发布24小时后过期
另外,为了保证数据发布、搜寻的一致性,规定在任何时候,当节点 w 发现新节点 u 比 w 上的某些 <key,value> 对数据更接近,则 w 把这些 <key,value> 对数据复制到 u 上,但是并不会从 w 上删除。
节点的加入和离开
如果节点 u 要想加入 Kad 网络,它必须要和一个已经在 Kad 网络的节点,比如 w,取得联系。
u 首先把 w 插入自己适当的 K 桶中,然后对自己的节点 ID 执行一次 FIND_NODE 操作 (向 w 发布 查找 u 的 FIND_NODE 请求),然后根据接收到的信息更新自己的 K 桶内容。通过对自己邻近节点由近及远的逐步查询,u 完成了仍然是空的 K 桶信息的构建,同时也把自己的信息发布到其他节点的 K 桶中。
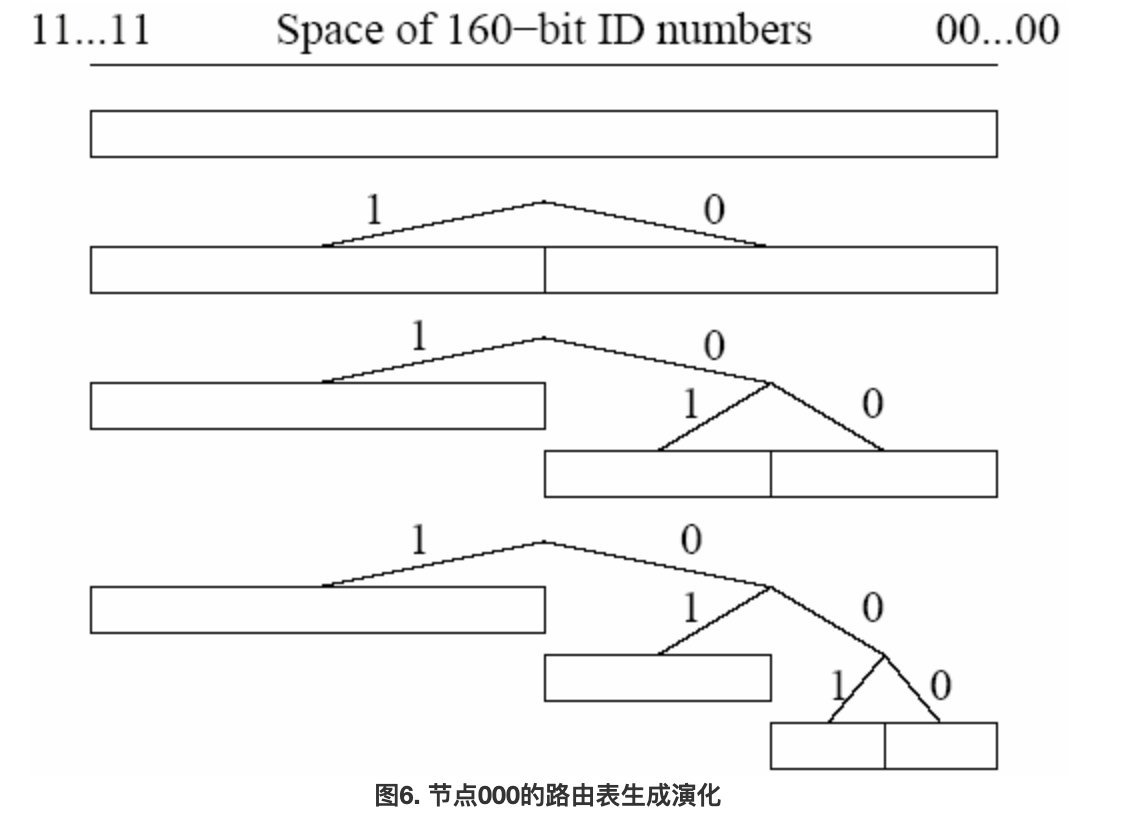
节点 u 为例,其路由表的生成过程为:
- 最初,u 的路由表为一个单个的 K 桶,覆盖了整个 160 bit ID 空间,如图 6 最上面的路由表;
- 当学习到新的节点信息后,则 u 会尝试把新节点的信息,根据其前缀值插入到对应的 K 桶中:
- 如果该 K 桶没有满,则新节点直接插入到这个 K 桶中;
- 如果该 K 桶已经满了,
- 如果该 K 桶覆盖范围包含了节点 u 的 ID,则把该 K 桶分裂为两个大小相同的新 K 桶,并对原 K 桶内的节点信息按照新的 K 桶前缀值进行重新分配
- 如果该 K 桶覆盖范围没有包节点 u 的 ID,则直接丢弃该新节点信息
- 上述过程不断重复,最终会形成表 1 结构的路由表。达到距离近的节点的信息多,距离远的节点的信息少的结果,保证了路由查询过程能快速收敛。
在图 7 中,演示了当覆盖范围包含自己 ID 值的 K 桶是如何逐步分裂的。
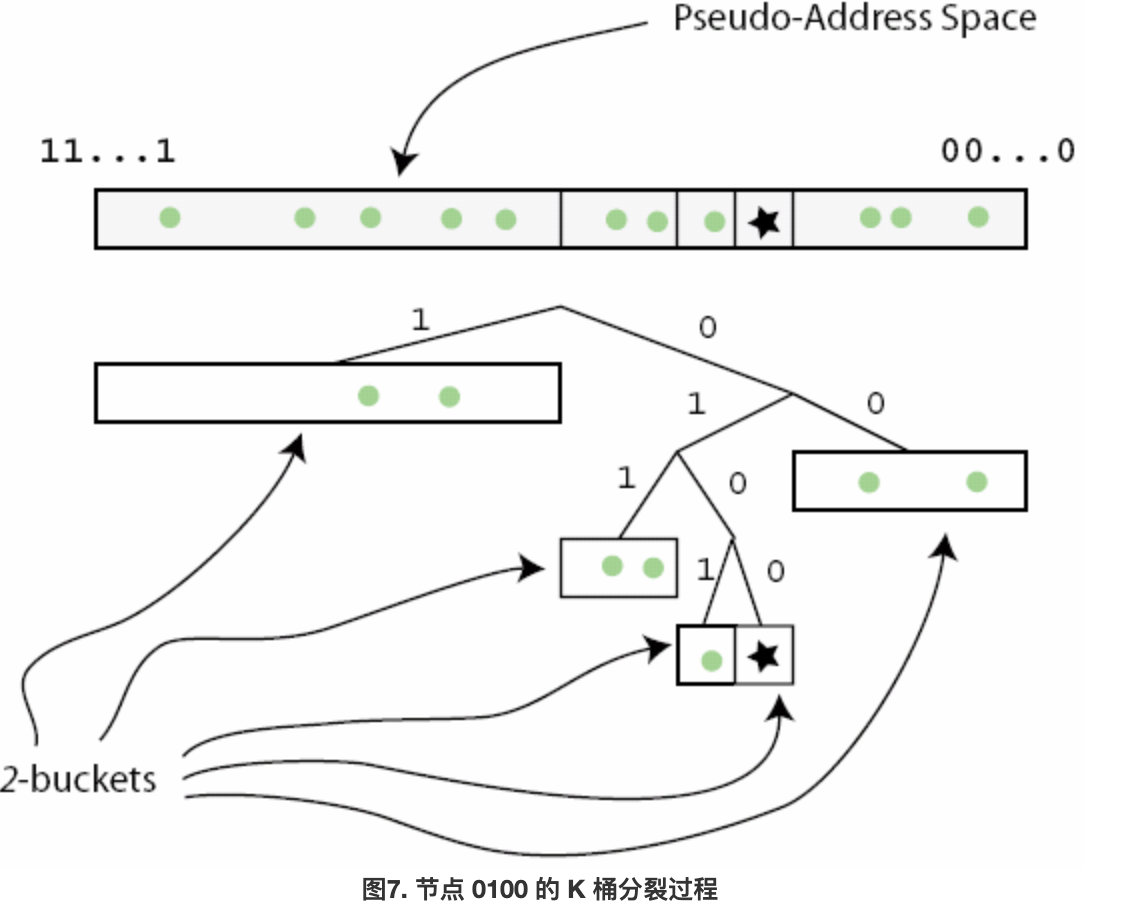
当 K 桶 010 满了之后,由于其覆盖范围包含了节点 0100 的 ID,故该 K 桶分裂为两个新的 K 桶:0101 和 0100,原 K 桶 010 的信息会根据其其前缀值重新分布到这两个新的 K 桶中。注意,这里并没有使用 160 bit 的 ID 值表示法,只是为了方便原理的演示,实际 Kad 网络中的 ID 值都是 160 bit 的。
节点离开 Kad 网络不需要发布任何信息,Kademlia 协议的目标之一就是能够弹性工作在任意节点随时失效的情况下。为此,Kad 要求每个节点必须周期性 【一般是: 每小时】 的发布全部自己存放的 <key,value> 对数据,并把这些数据缓存在自己的 k 个最近邻居处,这样存放在失效节点的数据会很快被更新到其他新节点上。所以有节点离开了,那么就离开了,而且节点中的k-桶刷新机制也能保证会把已经不在线的节点信息从自己本地k-桶中移除
参考
公众号:区块链技术栈





